Fischertechnik
AVR
Raspberry Pi
Elektronik
Netzwerk
Sonstiges
Impressum
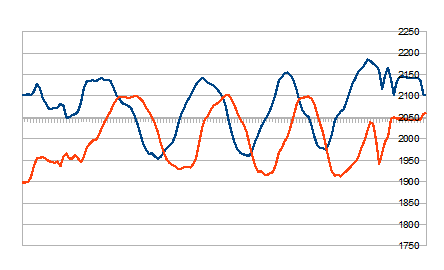
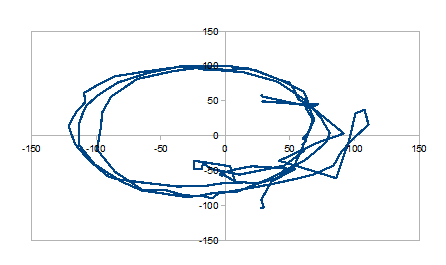
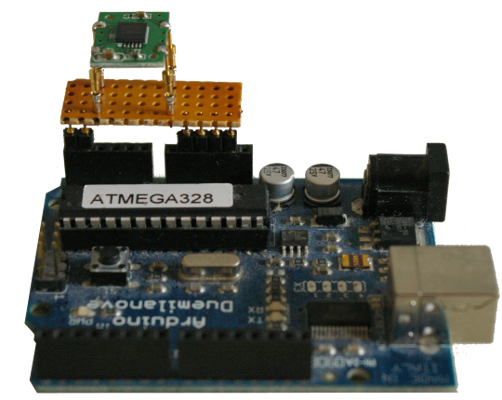
Erste Tests mit Pollin Kompassmodul HDMM01
Arduino Quelltext
#define I2ADDR 0x30 // MMC2120=0x30 MMC2121=0x32 MMC2122=0x34 und MMC2123=0x36
#define TakeMeasure 0x01
#include <Wire.h>
void setup(){
Wire.begin();
Serial.begin(115200);
}
void loop(){
byte MsbX,LsbX,MsbY,LsbY;
int x,y;
char line[80];
Wire.beginTransmission(I2ADDR); // Pollin HDMM01 mit MEMSIC MMC212xMG
Wire.send(0x00); // Adressfeld spielt hier keine Rolle
Wire.send(TakeMeasure); // Befehl zum Messen
Wire.endTransmission(); // stop transmitting
delay(20); // mindestens 5 Millisekunden warten
Wire.beginTransmission(I2ADDR); // Pollin HDMM01 mit MEMSIC MMC212xMG
Wire.send(0x01); // Adressfeld 1 um die 4 relevanten Register auszulesen
Wire.requestFrom(I2ADDR, 4);
while(Wire.available()<4);
MsbX =Wire.receive(); // obere 4 Bit X
LsbX =Wire.receive(); // untere 8 Bit X
MsbY =Wire.receive(); // obere 4 Bit Y
LsbY =Wire.receive(); // untere 8 Bit Y
Wire.endTransmission(); // stop transmitting
x=((MsbX&0x0f)*256)+(LsbX);
y=((MsbY&0x0f)*256)+(LsbY);
sprintf(line,"%02X %02X %02X %02X X=%4d Y=%4d\n",MsbX,LsbX,MsbY,LsbY,x,y);
Serial.print(line);
delay(400);
}